
 Ictiología
Ictiología GNSS
GNSS Velocidad del Sonido (SVP/SVS)
Velocidad del Sonido (SVP/SVS) Magnetómetros
Magnetómetros Ecosondas Multihaz
Ecosondas Multihaz Sensores Inerciales (INS)
Sensores Inerciales (INS) Parámetros físico-químicos
Parámetros físico-químicos Perfiladores de Fondo
Perfiladores de Fondo Ecosondas Monohaz
Ecosondas Monohaz Sensores de Movimiento (IMU)
Sensores de Movimiento (IMU) Marea
Marea ROV
ROV Sonar Barrido Lateral
Sonar Barrido Lateral Sensores de Rumbo
Sensores de Rumbo Corrientes y Oleaje
Corrientes y Oleaje Otros tipos de Sonar
Otros tipos de Sonar Telemetría de datos
Telemetría de datos Monitorización ambiental
Monitorización ambiental USV AUV
USV AUV Software
Software Bioacústica
Bioacústica Muestreo
Muestreo Acuicultura y Pesca
Acuicultura y Pesca Instalación y puesta en marcha
Instalación y puesta en marcha Servicio Técnico
Servicio Técnico Consultoría
Consultoría Formación
Formación Embarcación de trabajo
Embarcación de trabajo Drone (UAV)
Drone (UAV)












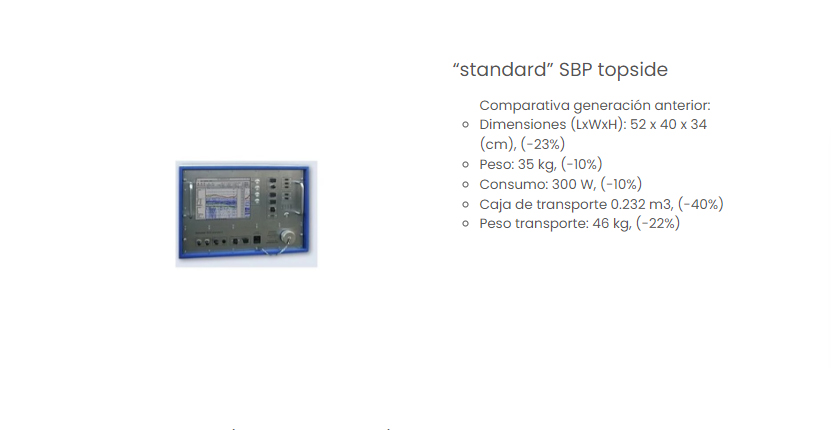
El perfilador de fondos paramétrico SBP Standard Innomar es el más versátil: es lo suficientemente pequeño como para ser utilizado en embarcaciones pequeñas para levantamientos costeros, pero también lo suficientemente potente como para ser aplicable en levantamientos marinos hasta 500 metros de profundidad del agua.
Un software de control del sistema y adquisición de datos (SESWIN), es fácil de usar y brinda la posibilidad de operar de forma remota en red, así como visualización remota de datos.
El modelo “standard” de Innomar adquiere datos de Ecograma completo que se pueden procesar con cualquier software sísmico (formato SEG-Y).completo que se puede procesar con cualquier software sísmico.
Perfilador de fondos:
- Rango de profundidad: 0.5 – 500m
- Penetración de sedimentos: hasta 50m (dependiendo del tipo de sedimento y el ruido)
- Rango / Capa Resolución: aprox. 1 cm / hasta 5cm
- Frecuencias primarias: aprox. 100 kHz (85-115kHz)
- Frecuencia secundaria: 4, 5, 6, 8, 10, 12, 15kHz, seleccionable por el usuario
- Ancho de pulso: 0.07 – 1.5ms
- Velocidad de ping hasta: 60 pings/s
- Tipo de pulso: Ricker, CW, LFM chirp
- Los datos se pueden registrar en el nuevo INNOMAR “SES3” de 24 bits
Características incluidas:
- Estabilización de haz de balanceo/oscilación (o cabeceo)
- Adquisición de datos de forma de onda completa SLF de 24 bits / formato de datos Innomar “SES3”
- Modo multi-ping para mantener una frecuencia de pulso alta en aguas profundas
- Señales multifrecuencia
- Chirp FM
- Control remoto básico SESWIN a través de COM/UDP (p. ej. inicio/parada de línea, nombre de línea)
- Adaptador de alimentación de CA externo (100–240 V CA)
Sub-Bottom Profiler “Innomar Standard-USV”
El modelo “Innomar standard-usv” está diseñado para su uso en vehículos de superficie sin tripulación (USV/ASV). La alta tasa de pulsos, el tamaño reducido y la posibilidad de transmitir pulsos de sonido en un amplio rango de frecuencias garantizan datos del subsuelo con una excelente resolución y una muy buena penetración en los sedimentos.
La estabilización electrónica del haz a lo largo de la línea: balanceo-roll y cabeceo-pitch, se utiliza para compensar los movimientos del vehículo inducidos por las olas. Se utiliza un software de control del sistema y adquisición de datos de Windows fácil de usar (SESWIN) para la operación remota (Ethernet).
El modelo “Innomar standard-usv” adquiere datos de forma de onda completa que se pueden procesar con cualquier software sísmico (formato SEG-Y). Innomar también proporciona el software de posprocesamiento ISE especializado en los datos SBP de Innomar.




