Ictiología
Ictiología GNSS
GNSS Velocidad del Sonido (SVP/SVS)
Velocidad del Sonido (SVP/SVS) Magnetómetros
Magnetómetros Ecosondas Multihaz
Ecosondas Multihaz Sensores Inerciales (INS)
Sensores Inerciales (INS) Parámetros físico-químicos
Parámetros físico-químicos Perfiladores de Fondo
Perfiladores de Fondo Ecosondas Monohaz
Ecosondas Monohaz Sensores de Movimiento (IMU)
Sensores de Movimiento (IMU) Marea
Marea ROV
ROV Sonar Barrido Lateral
Sonar Barrido Lateral Sensores de Rumbo
Sensores de Rumbo Corrientes y Oleaje
Corrientes y Oleaje Otros tipos de Sonar
Otros tipos de Sonar Telemetría de datos
Telemetría de datos Monitorización ambiental
Monitorización ambiental USV AUV
USV AUV Software
Software Bioacústica
Bioacústica Muestreo
Muestreo Acuicultura y Pesca
Acuicultura y Pesca Instalación y puesta en marcha
Instalación y puesta en marcha Servicio Técnico
Servicio Técnico Consultoría
Consultoría Formación
Formación Embarcación de trabajo
Embarcación de trabajo Drone (UAV)
Drone (UAV)















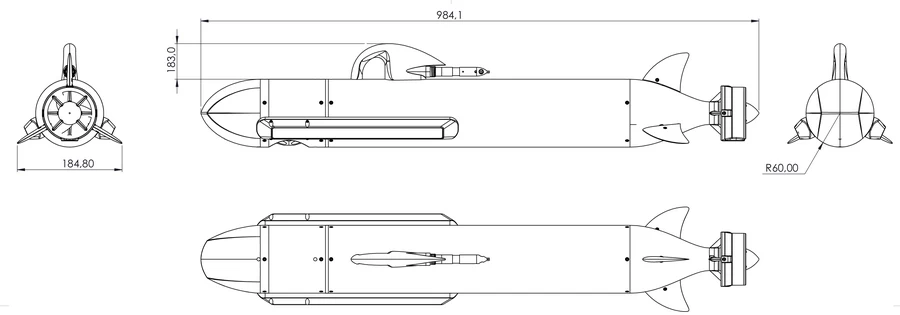
Los Micro-AUVs YUCO de SEABER son unos vehículo autónomo AUV, que navega bajo el agua sin necesidad de intervención humana, para la investigación oceanográfica y el seguimiento medioambiental.
Principales características de YUCO:
- Diseño robusto: Para garantizar un casco a prueba de inundación, YUCO está dividido en 2 secciones:
- Sección central / trasera viene sellada de fábrica y no es accesible para el usuario. Este compartimento seco contiene el sistema de navegación completo, que incluye baterías, actuadores, sensores de localización y electrónica integrada.
- Sección húmeda ubicada en la parte delantera (nariz), contiene la carga útil del sensor y es accesible para el usuario. Está equipada con los conectores necesarios para una rápida integración plug-and-play de nuevos sensores.
- Navegación de alta precisión con INX: El sistema de navegación patentado de alta precisión de SEABER para micro-AUV de YUCO se llama INX. Basado en los algoritmos avanzados de navegación submarina de SEABER, INX proporciona una navegación de alto rendimiento en una plataforma altamente configurable para optimizar y mejorar continuamente la experiencia de navegación. Los sensores DVL y de profundidad están completamente integrados, para una navegación precisa, capaz de gestionar áreas costeras con olas y corrientes.
- Planificador de misiones SEAPLAN: Un interfaz de usuario potente y moderna, que ofrece flexibilidad de programación, intuitiva y fácil uso. Puede programar los patrones de navegación y los sensores de carga útil para que se activen en distintos intervalos. SEAPLAN ofrece modos de navegación exclusivos dedicados para el YUCO CTD y PAM. La interfaz SEAPLAN es accesible a través de WiFi.
- Fácil recuperación: YUCO es muy visible en la superficie, gracias a su color rosa neón y potentes LED parpadeantes. Para garantizar la comunicación de superficie, el mástil de YUCO está equipado con 3 tipos de antenas de comunicación inalámbrica: satélite, GSM y radio. Además, el control remoto de mano (SEACOMM) muestra la posición GPS de YUCO al salir a la superficie y una práctica función de “regreso a casa”.
YUCO presenta una amplia gama de micro-AUV adaptados a sus misiones:
YUCO CARRIER micro-AUV, la herramienta ideal para integrar sus sensores o incluso sus sondas autónomas
Oceanografía – Hidrografía |
YUCO-SCAN micro-AUV, Sonar de barrido lateral de 680 kHz DeepVision. Imágenes de sonar de alta calidad, estabilidad y navegación precisa incluso en áreas costeras con olas y corrientes
Hidrografía – Cartografía fondo marino – Arrecifes – Praderas marinas |
YUCO-CTD micro-AUV, sensor CT “Legato” de RBR. Apagado en superficie, podrás realizar perfiles verticales o navegar a profundidades preestablecidas
Oceanografía – Dinámica costera – Calidad del agua – Contaminación marina |
| YUCO-FHYSICO micro-AUV, sonda multiparamétrica completamente autónoma de AML Elija entre muchas opciones de sensores: Velocidad del sonido, conductividad, oxígeno disuelto, turbidez, pH, clorofila A o petróleo crudo
Calidad del agua – Oceanografía – Dinámica costera – Contaminación marina |
YUCO-PAM micro-AUV, grabador acústica submarina completamente autónomo “Porpoise” de RsAqua. Muestreo preprogramado, activado por AUV o continuo
Control ruido submarino – Ruido obra marina – Monitoreo cetáceos |





Especificaciones comunes:
- Profundidad nominal: 300 m
- Peso: 8-10kg
- Largo: 98-123cm
- Diámetro: 12cm
- Velocidad: 3 – 6 nudos
- Precisión de Navegación: +/- 2%
- Baterías recargables
- Autonomía: 10 horas a 3 knots / 6 horas a 4 knots (con baterías Li-Ion)
DATASHEET YUCO CARRIER DATASHEET YUCO SCAN
DATASHEET YUCO CTD DATASHEET YUCO FHYSICO DATASHEET YUCO PAM